projects
Projects from my master's and bachelor's studies.
MSc. Thesis: Imitation Learning From Observation Through Score-Based Generative Modelling
| Thesis | Website | Related Literature Report |
MSc. Coursework
The robotics master program at TU Delft was an extremely fun experience. The program is very focused on practical experience and equipping students with skills applicable to research and industry. I tailored my coursework to focus on the cognitive capabilities of robots and have followed courses on various flavours of machine learning, perception, robot planning, and decision making. Some of my favourite projects are shown below.
Knowledge enabled planning w/ PDDL & Prolog
Path planning for non-holonomic robots (RRT*) & reference tracking w/ MPC
Behaviour cloning w/ vanilla RNN

Symbolic regression population initialisation w/ DQN
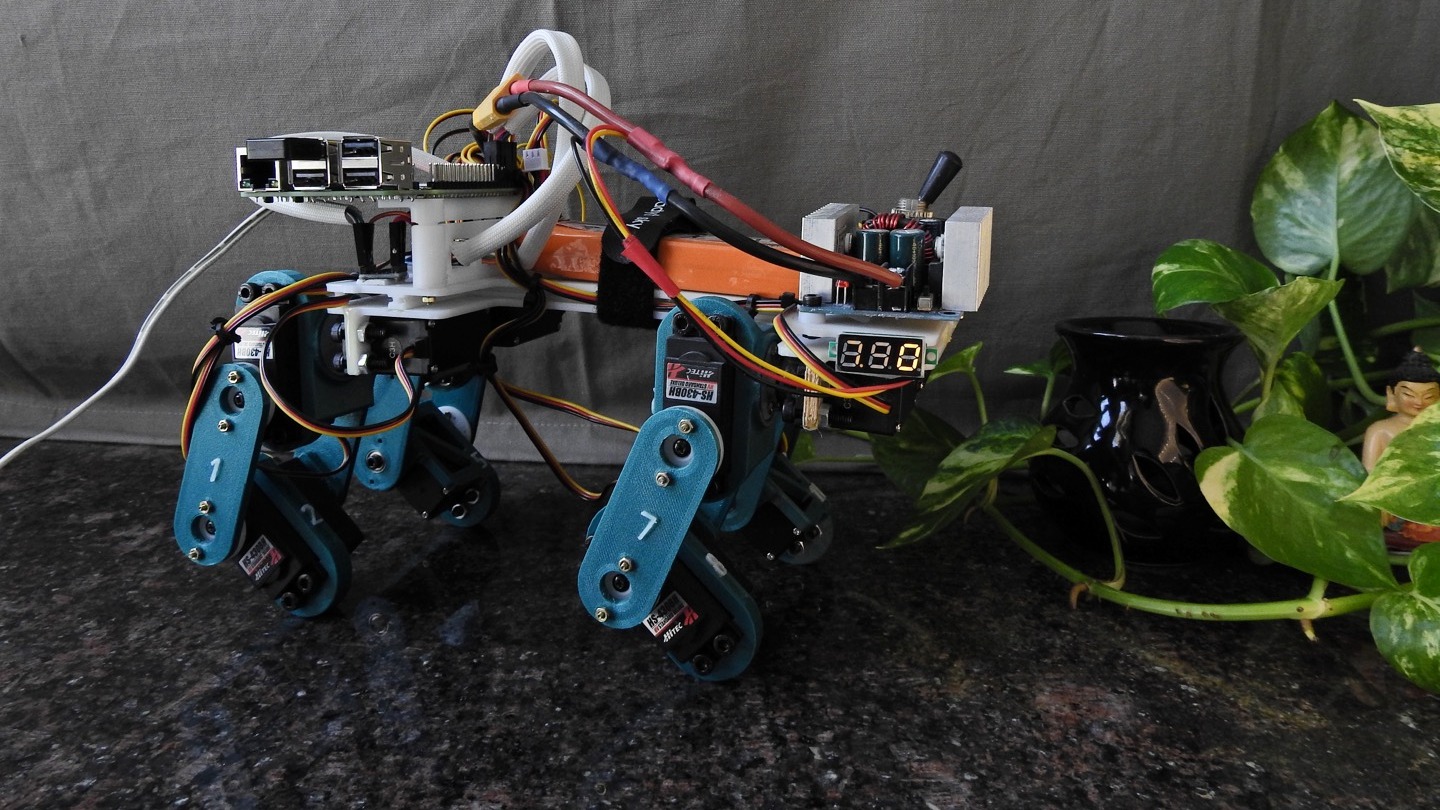
B.Tech Thesis: Quadrupedal Robots & Stability Enhancing Bio-Inspired Systems
My undergraduate thesis aimed to develop a fully functional, low-cost quadrupedal robot to progress research in the area of legged robot stability enhancement. Subsequent work on this robotic platform was then carried out to study the effect of passively-compliant, bio-inspired feet mechanisms on its static and dynamic walking stability.
University Rover Challenge
The University Rover Challenge is an international college-level robotics competition where student teams compete to build the next generation of Mars Rovers. As a part of my university’s student team (called RoverX), I contributed to the development of the rover and specifically its robotic manipulator.
